


多面向尖端AI系統均可部署於邊緣運算端(機載電腦),地面端(GCS),手持遙控器以及雲端伺服器。

3D Gaussian-Splatting 高斯場
運用高斯場技術,突破傳統二維影像的限制,實現精準的三維空間重建與感知,為複雜環境下的自動化任務開創新局。

物體識別+ID追蹤
透過先進的物體識別技術,精準辨識並鎖定目標,並利用ID追蹤系統,實現高效且可靠的連續監控與追蹤。
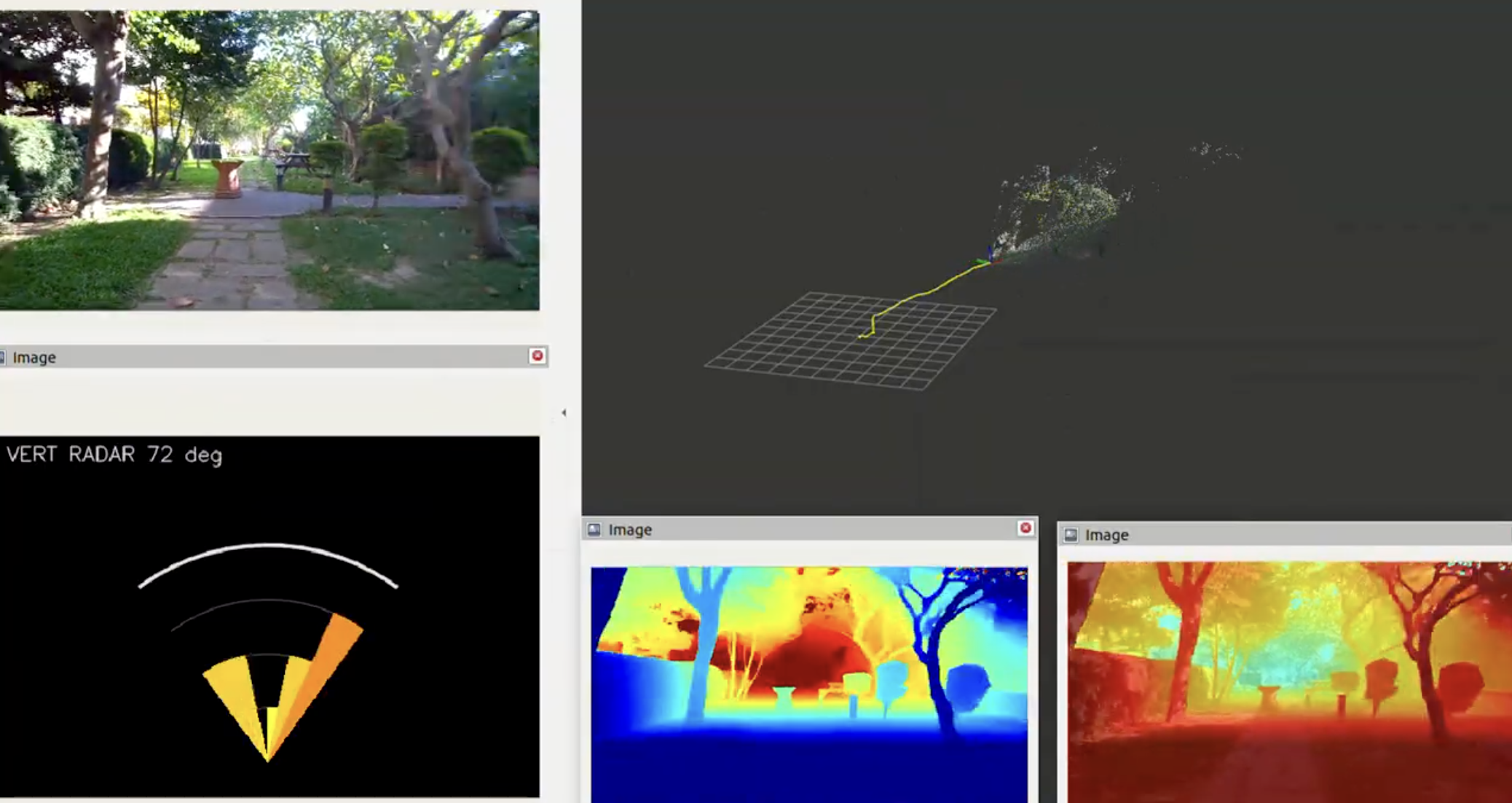
單目深度估計
僅透過單一攝影機影像,即可精準感知環境的三維深度資訊,為無人機在複雜環境中的自動化任務提供關鍵視覺能力。

車流檢測
精準分析路口流量,提供即時數據以優化交通號誌控制與道路規劃,有效提升城市交通效率。
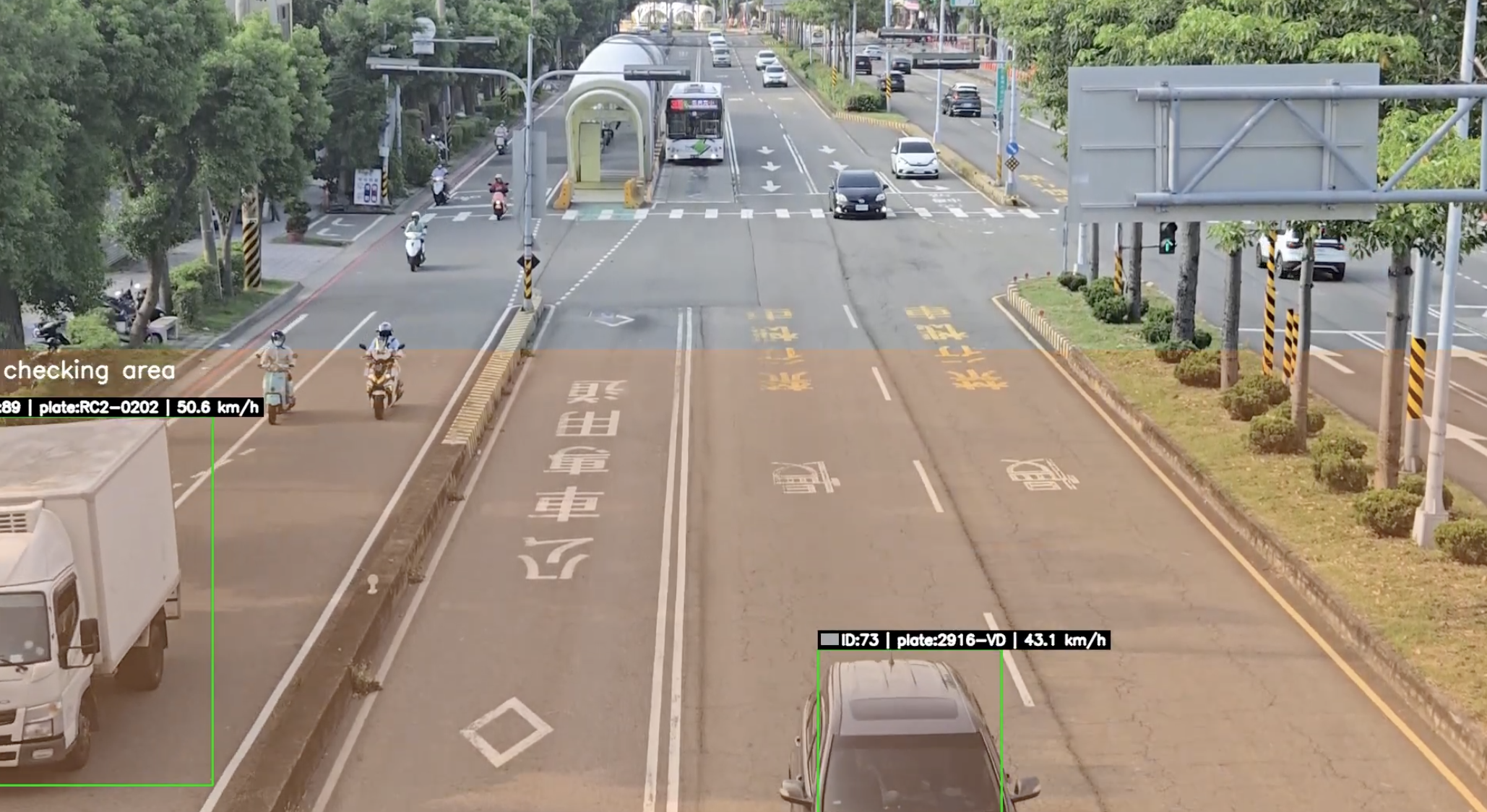
車速與車牌辨識
精準地進行車速測量與車牌辨識,為交通執法、安全監控及智慧城市管理提供革命性的解決方案。
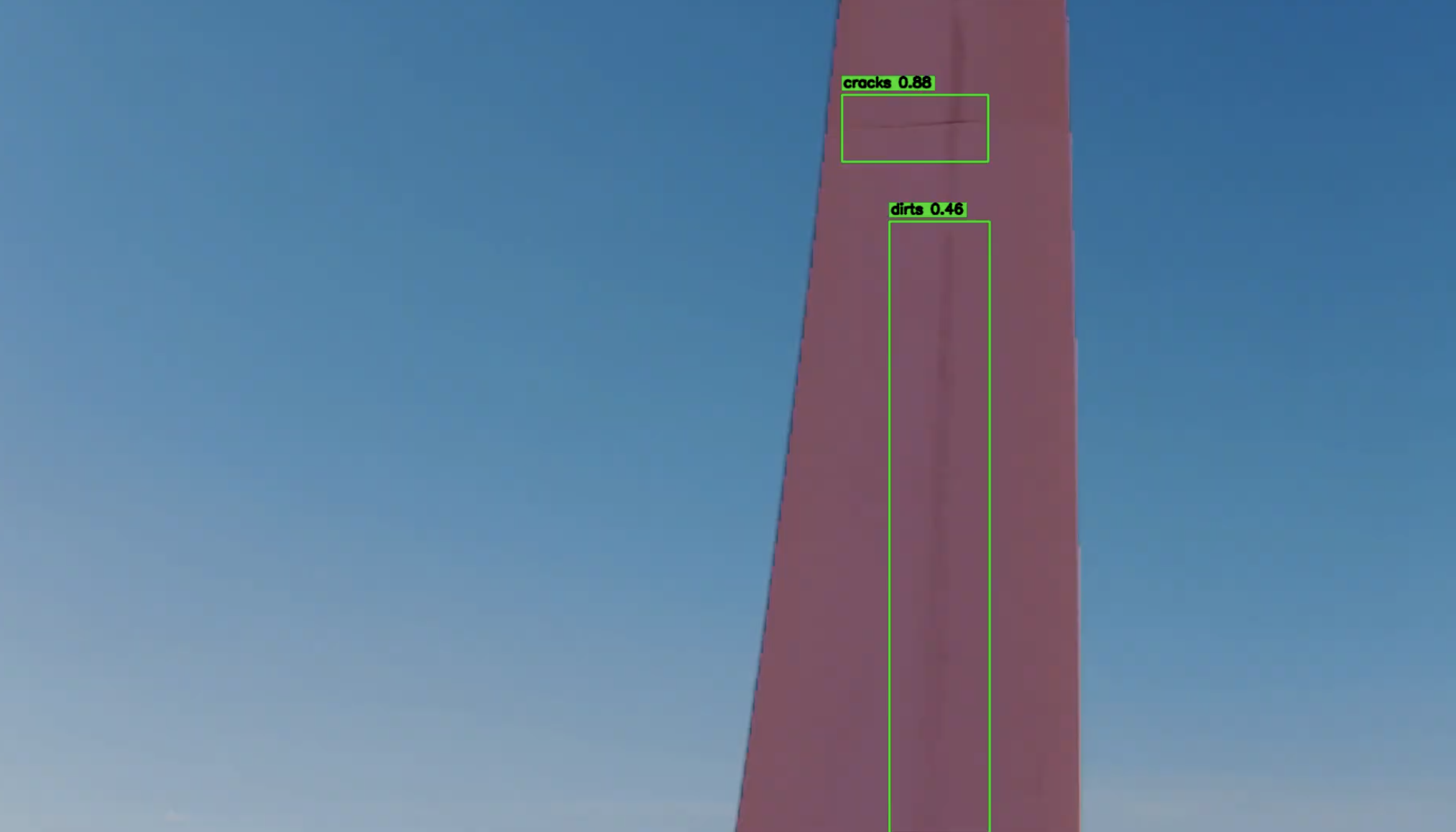
異常檢測(風機檢測)
高效識別葉片裂縫、腐蝕等問題,大幅提升維護效率與安全性。

三維重建 3D reconstruction
• 基於 Mesh 網格結構的 3D 建模優化技術,用於快速生成並細化三維模型
• 透過網格簡化與細分(Mesh Optimization)演算法,在保留幾何細節的同時,提升模型效率與畫質
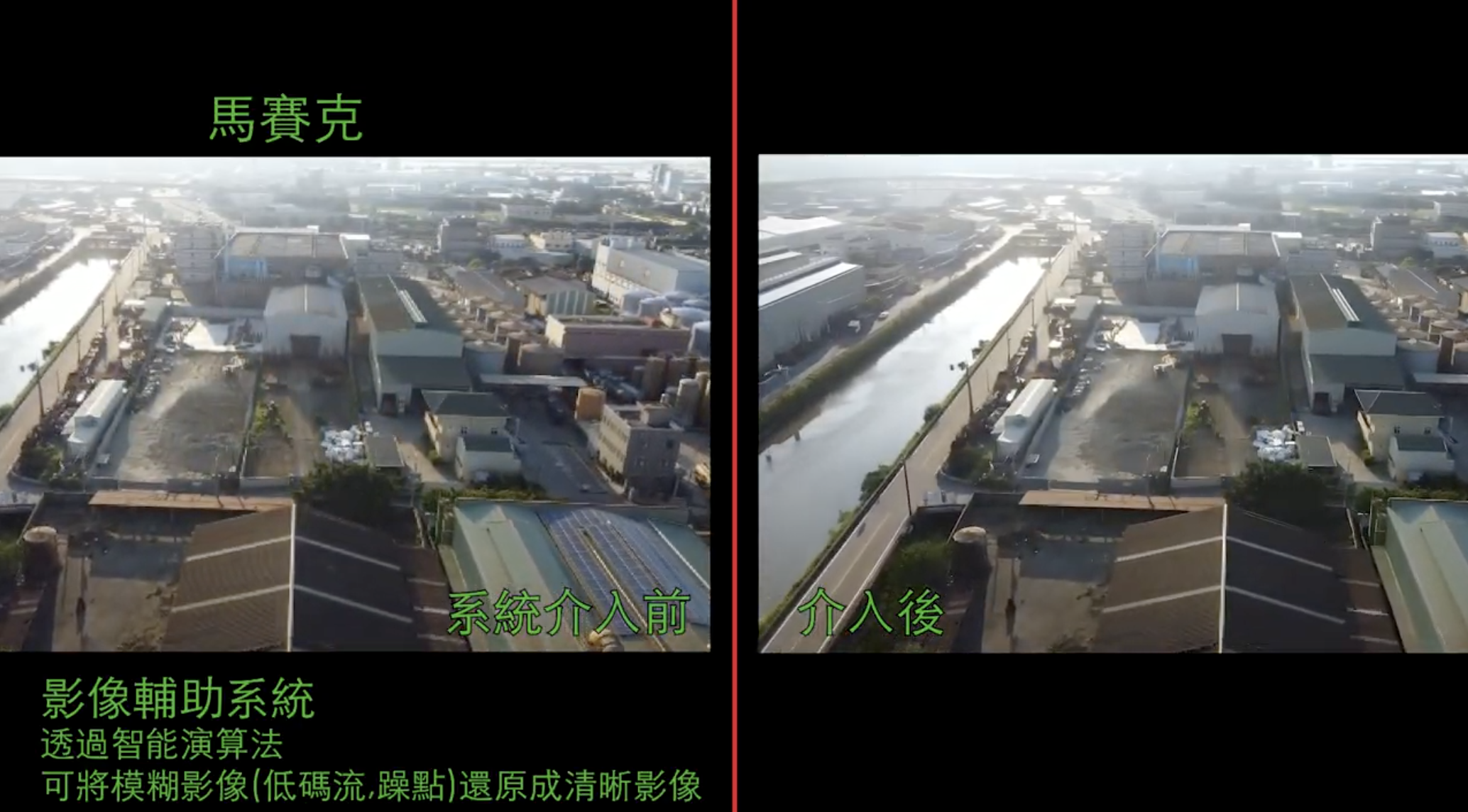
即時影像强化系統
Realtime Video Stream Augmentation
無人載具在執行任務中,影像品質常因通訊品質不佳、頻寬受限或劇烈動作造成抖動與模糊而下降。透過地面端的高效運算資源,本系統可即時進行影像增強處理,將低品質畫面修復至可用水準,無論是後續演算法分析或人員即時觀看,都能獲得更清晰與穩定的影像。
目前功能包括(10fps):
影像去雨化(Derain):有效去除雨滴干擾,保持畫面清晰穩定
動態去模糊(Motion Deblur):針對運動模糊進行修復,還原清晰細節
影像去雜訊(Gaussian Denoise):降低高斯類型雜訊,提升畫質純淨度
去除馬賽克還原(Demosaic):解決傳輸不良造成的馬賽克影像,恢復真實畫面
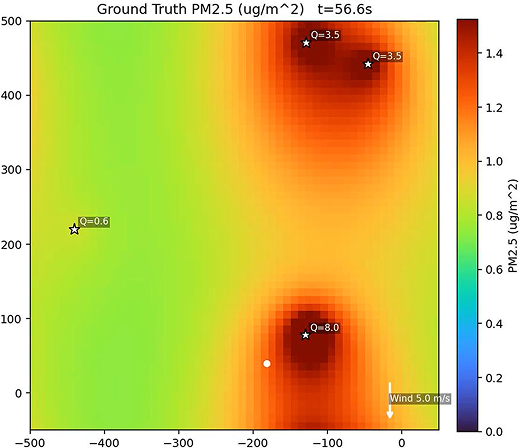
污染即時 監測地圖
• 無人載具於巡檢飛行中同步蒐集空氣污染數據
• 即時生成高解析度污染濃度地圖
• 可生成2D與3D地圖
• 高亮顯示污染熱點與異常值區域
• 可自動匯出污染分布與變化趨勢報表
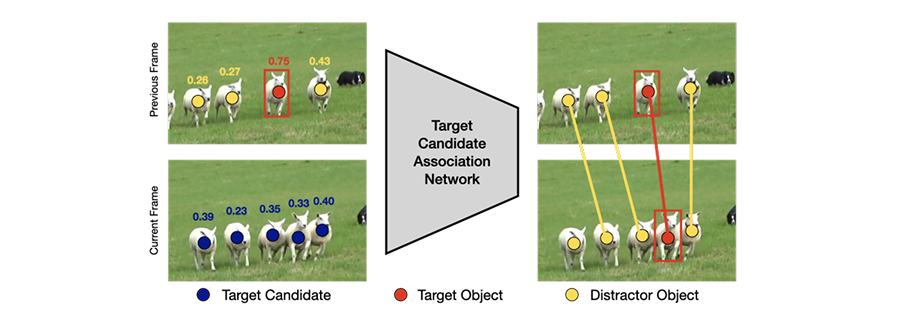
監測無訓練追蹤 Visual Tracking
視覺追蹤是一種即時目標追蹤技術,不需額外訓練資料,只需在畫面中框選目標,即可立即開始追蹤。系統會持續分析影像幀,動態更新目標位置,適用於多變且未知的場景在高速運動與複雜環境 下依然具備穩健表現
• 採用最新 ViT 架構,追蹤更穩定、更精準
• 支援 多目標追蹤,同時辨識多個物件
• 能在 相似物件密集場景 中保持區分能力